

CAN-FD LIN Gateway je uživatelsky programovatelný převodník/data logger/simulátor, který poskytuje dva CAN/CAN FD kanály, LIN kanál a RS-232 port. Převodník dále obsahuje slot na microSD kartu a několik digitálních a analogových vstupů a výstupů. Firmware lze programovat v jazycích C nebo C++ a převodník lze díky jeho různým periferiím využít pro mnoho aplikací: konverze dat mezi sběrnicemi, logování a simulace komunikace, monitoring a ovládání externích periferií.
CAN FD LIN Gateway – katalogový list
Vlastnosti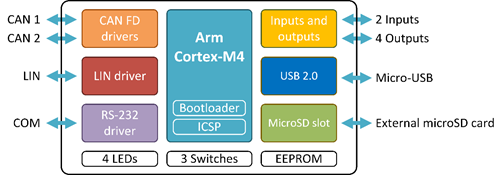
- dva CAN-HS kanály s podporou CAN FD
- LIN bus kanál
- RS-232 port
- slot pro MicroSD kartu
- USB port
- 4 digitální výstupy
- 2 analogové/digitální vstupy
- 4 stavové LED
- firmware uživatelsky programovatelný v C/C++
- zdarma vývojové prostředí (IDE) a C/C++ kompilátor
- vzorový zdrojový kód firmware s ukázkami využití periferií v jazyce C
- nahrání firmware do zařízení přes USB, CAN, RS-232 nebo ICSP
- 32-bit Arm Cortex-M4 MCU s 512 KB ROM, 128 KB RAM
- 16 Kbit EEPROM
- externí napájení nebo napájení z USB
- umístění na stůl nebo montáž na DIN lištu
Převodník je založený na mikrokontroléru STM32G4 (Arm Cortex-M4), ke kterému je zdarma vývojové prostředí (STM32CubeIDE) i C/C++ GNU kompilátory. Firmware zařízení si uživatel může vyvinout sám v jazycích C nebo C++ a následně ho do zařízení nahraje přes USB, CAN, RS-232 nebo standardní programovací ICSP SWD interface (ST-LINK). K dispozici jsou příklady zdrojových kódů použití jednotlivých periferií. Zařízení má paměť rozšířenou o EEPROM a také slot na microSD kartu. Uživatel tedy má možnost si uložit konfigurační a simulační data a nebo logovat komunikaci přímo na SD kartu. Čtyři digitální výstupy (s podporou PWM) a dva analogové/digitální vstupy poskytují možnost pro monitorování a ovládání externích periferií. Vstupy mají napětový rozsah 0 – 5 V a výstupy mají různé koncové stupně (push-pull, HSD, LSD) s proudovým zatížením až 1.5 A, což umožní ovládání externích zařízení jako relé atd.
Použití
- brána mezi CAN FD a CAN sběrnicemi
- převod zpráv mezi CAN a LIN
- konverze dat mezi CAN/LIN bus a RS-232
- logování komunikace
- simulace komunikace
- emulace řídicích jednotek
- vzdálené monitorování vstupů
- vzdálené ovládání výstupů