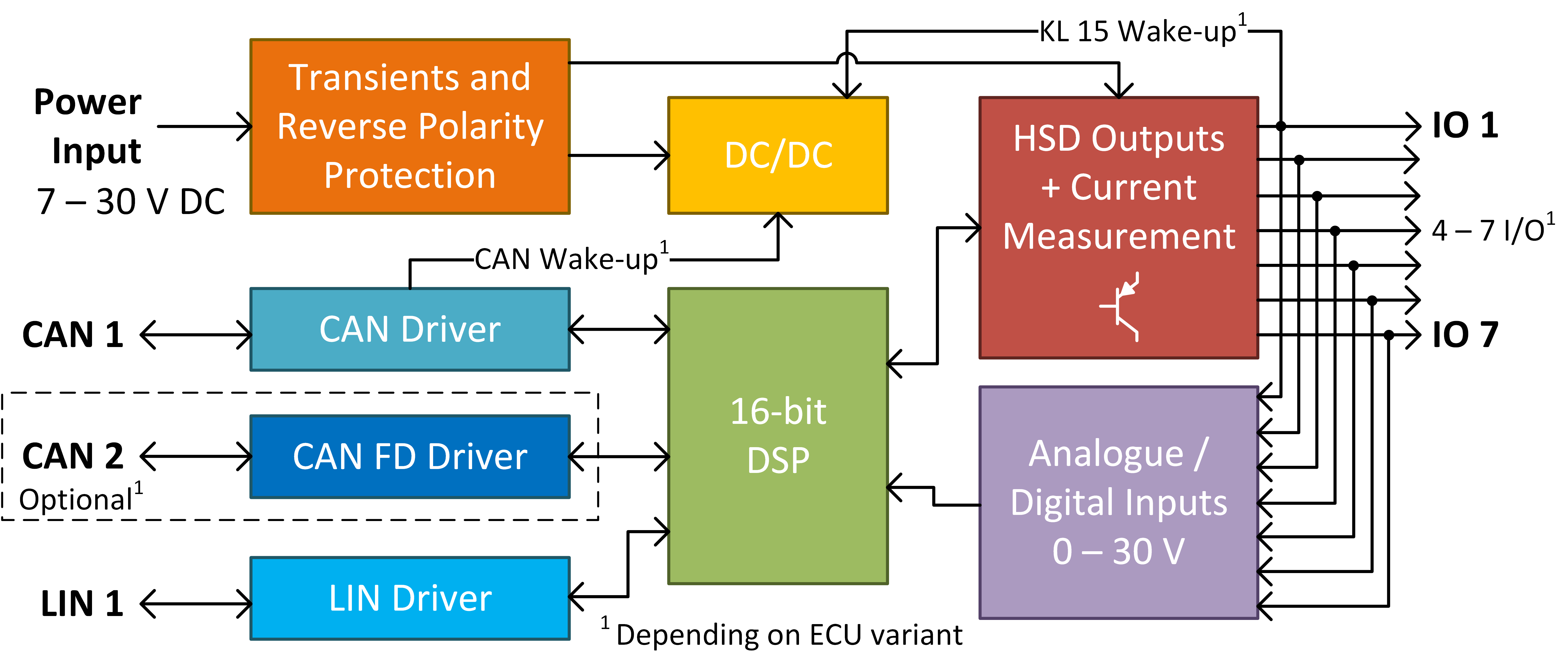
The CAN-LIN Gateway ECU is an electronic control unit that offers up to two CAN/CAN FD channels, a LIN channel, and several multi-purpose digital/analogue inputs and outputs. The control unit can realize a stand-alone communication bridge between CAN (/FD) and LIN buses, or act as a remote I/O module.
The ECU supports both SAE J1939 and raw CAN protocols, and is suitable for mobile and stationary applications in harsh automotive and industrial environments.
Bi-directional mapping between CAN, CAN FD and LIN communication channels can be configured by the user. On top of that, the user can map digital and analogue inputs and outputs onto CAN, CAN FD and LIN data frames.
The control unit comes with the ECU Configurator PC application that enables to easily configure the ECU over CAN bus.
Block Diagram
Communication Bridge – Network Gateway
The user can configure routing between communication channels. This is particularly useful when the ECU is used as a communication bridge, such as a CAN to LIN gateway. Bi-directional routing between physical channels can be set on frame-identifier basis, which allows for a great flexibility. The ECU’s non-volatile memory can store tens of routing records, where each record contains:
- Source channel and identifier (CAN-specific: standard / extended)
- Destination channel and identifier (CAN-specific: standard / extended)
- Route type: periodic (in ms) / event
- Timeout for periodic type: Resets destination data content to 0xFF
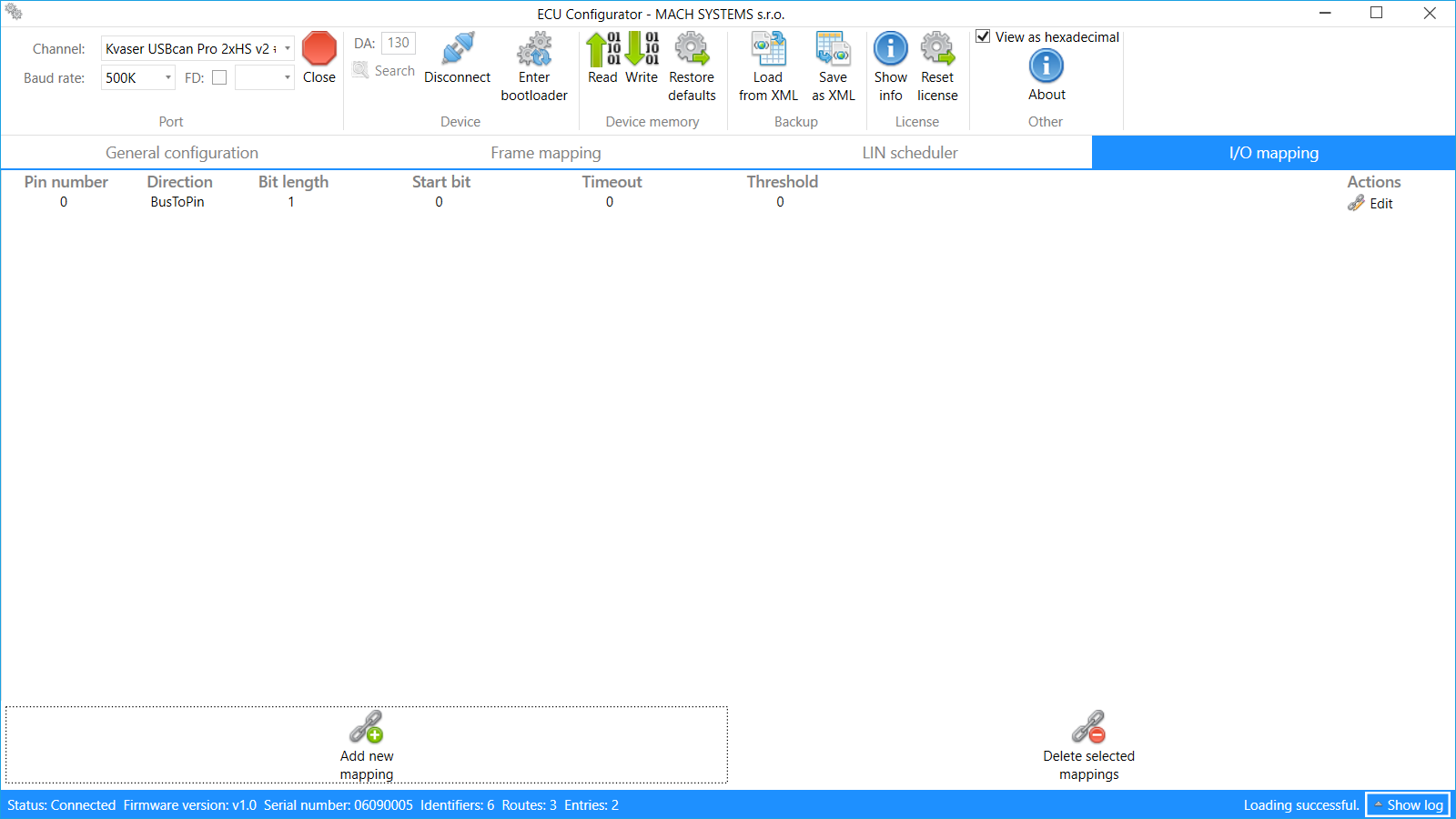
I/O Mapping
The user can configure mapping between physical I/O pin of the ECU and CAN/LIN data frames. Digital and analogue inputs can be mapped onto a data value of an outgoing frame, and an incoming frame’s data value can be mapped onto a digital output.
SAE J1939 mode is also supported – Digital and analogue input values are available over PGNs and digital outputs can be controlled by PGNs, too.
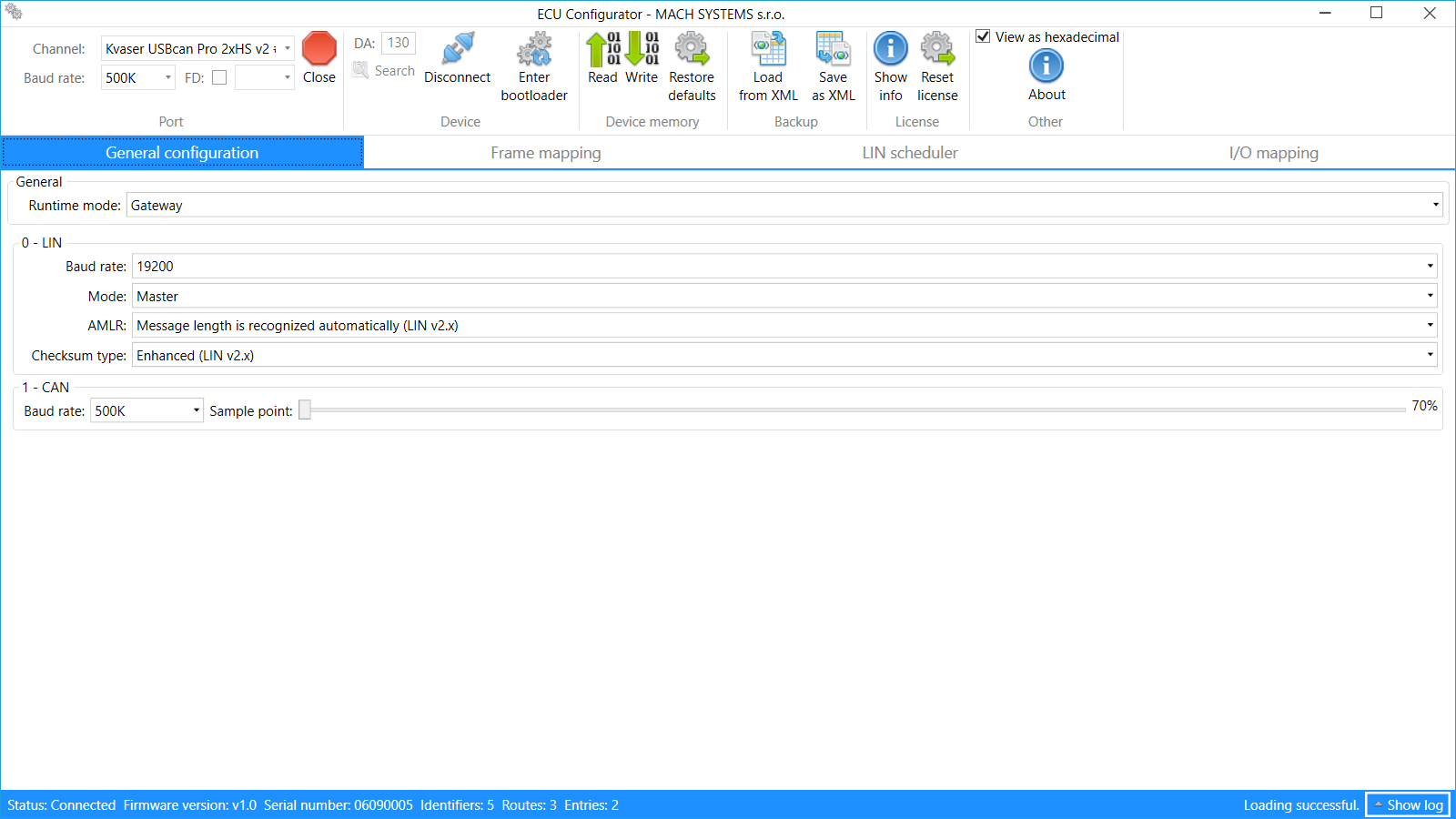
Easy ECU Configuration
The ECU Configurator PC application provides an easy way to configure the ECU over CAN bus. The following can be set:
- CAN channels’ parameters: baud rate, sample point, CAN FD: data phase baud rate and sample point
- LIN channel parameters: baud rate, master/slave, checksum type
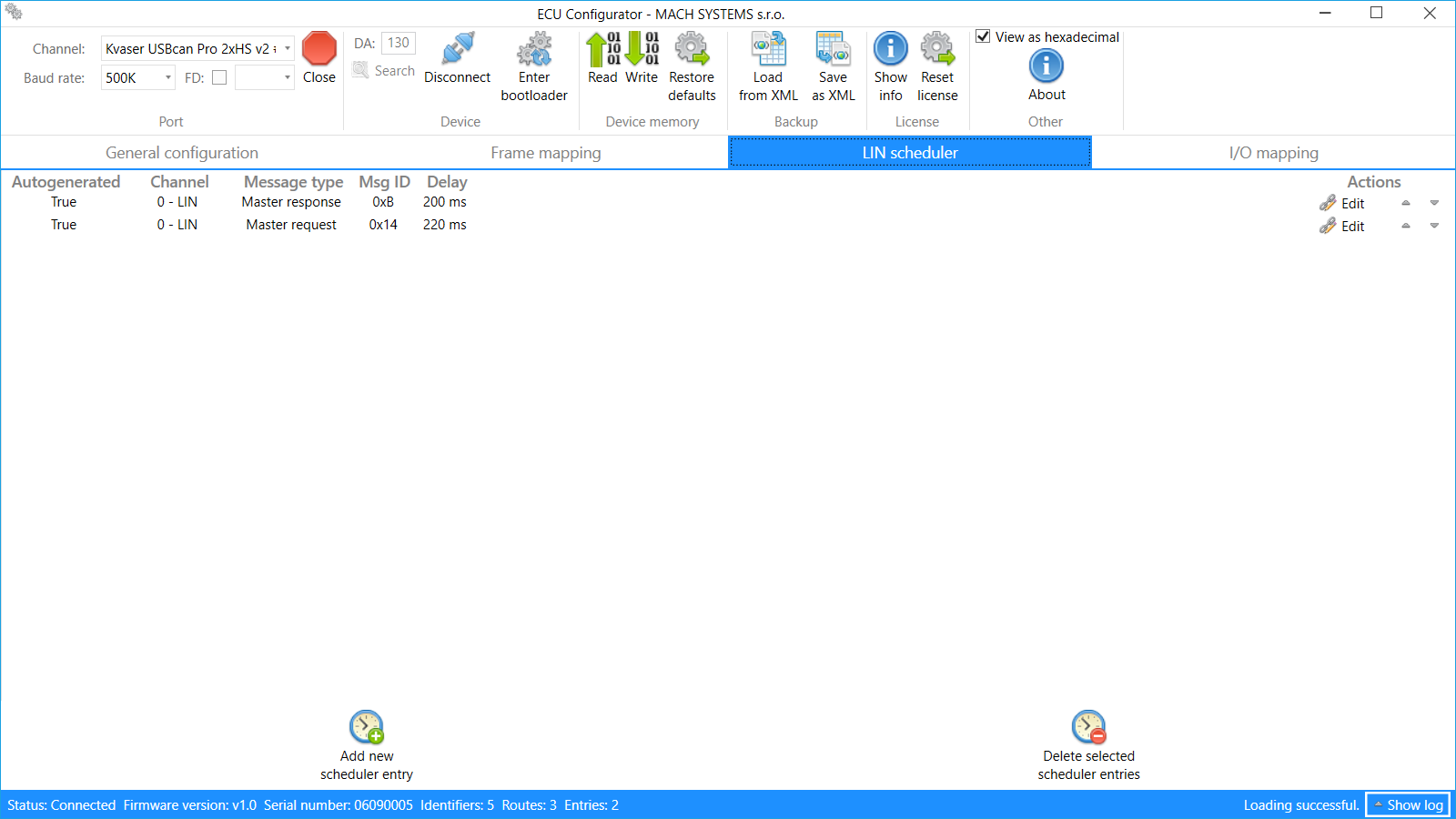
- LIN scheduler for master node: LIN identifiers and message delays
- Frame identifier routing: CAN to LIN and LIN to CAN, message cycle time and timeouts
- I/O mapping: digital/analogue input to CAN/LIN data frame content, CAN/LIN data frame bit position to digital output
- Device mode: configurable network gateway / SAE J1939 I/O ECU
The application uses the Kvaser CAN interface driver to access the CAN bus from PC.
Product Gallery